显示图像
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
| import cv2
img = cv2.imread("../images/leijun/3.jpg")
if img is None:
print("错误:无法加载图像,请检查路径是否正确!")
exit()
cv2.imshow("Display", img)
while True:
key = cv2.waitKey(0)
if key & 0xFF == ord('s'):
cv2.imwrite('saved.jpg', img)
print('图片已保存')
elif key & 0xFF == ord('q'):
break
else:
print('您按下了{}键'.format(chr(key)))
cv2.destroyWindow("Display")
cv2.destroyAllWindows()
|
读取图片报错
1
2
3
4
5
| [ WARN:0@0.025] global loadsave.cpp:268 cv::findDecoder imread_('../images/雷军/1.jpg'): can't open/read file: check file path/integrity
Traceback (most recent call last):
File "F:\repo\Python\opencv-leaning\chapter1\BaseOperation.py", line 5, in <module>
cv2.imshow("雷军", img)
cv2.error: OpenCV(4.11.0) D:\a\opencv-python\opencv-python\opencv\modules\highgui\src\window.cpp:973: error: (-215:Assertion failed) size.width>0 && size.height>0 in function 'cv::imshow'
|
 含中文路径的图片
含中文路径的图片
猜测是中文路径问题,将文件夹重命名为leijun即可
 image-20250427210458763
image-20250427210458763
图片可显示,但是图片分辨率太高,我的显示器显示不全
可以使用cv2.resize(src, dsize, fx, fy, interpolation)方法
src:
- 输入图像(通常是 NumPy 数组)。
- 示例:
src = cv2.imread("image.jpg")
dsize:
- 输出图像的尺寸,格式为
(width, height)。
- 如果指定了
dsize,则忽略 fx 和
fy。
- 示例:
(300, 200) 表示输出图像宽度为 300 像素,高度为
200 像素。
fx:
- 水平方向的缩放比例(宽度方向)。
- 默认值为
0,表示不使用此参数。
- 示例:
fx=0.5 表示水平方向缩小到原来的 50%。
fy:
- 垂直方向的缩放比例(高度方向)。
- 默认值为
0,表示不使用此参数。
- 示例:
fy=2.0 表示垂直方向放大到原来的 2 倍。
interpolation:
- 插值方法,用于决定如何调整像素值。
- 常见的插值方法及其适用场景如下:
cv2.INTER_NEAREST:最近邻插值(速度最快,但质量较差,适用于对质量要求不高的场景)。cv2.INTER_LINEAR:双线性插值(默认值,适用于缩小或放大)。cv2.INTER_CUBIC:三次插值(质量更高,但速度较慢,适用于对质量要求较高的场景)。cv2.INTER_AREA:区域插值(适用于缩小图像,效果较好)。cv2.INTER_LANCZOS4:Lanczos
插值(高质量插值,但计算成本高,适用于对质量要求极高的场景)。
显示视频
视频的显示是通过imshow方法逐帧显示每一帧的画面组合起来从而形成的视频效果
1.捕获视频
捕获本机摄像头
1
| cap = cv2.VideoCapture(0)
|
参数0为默认摄像头,1/2/…为本机其他摄像头(如有)
捕获本地视频文件
1
| cap = cv2.VideoCapture('video.mp4')
|
捕获网络视频流
1
| cap = cv2.VideoCapture('https://vjs.zencdn.net/v/oceans.mp4')
|
设置属性
使用 set()
方法来设置摄像头或视频捕获的各种属性,例如分辨率、帧率等。
1
2
3
4
5
6
7
8
| cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)
cap.set(cv2.CAP_PROP_FPS, 30)
|
获取属性
使用 get()
方法可以获取当前视频捕获的各种属性,比如宽度、高度、帧率等。
1
2
3
4
| width = cap.get(cv2.CAP_PROP_FRAME_WIDTH)
height = cap.get(cv2.CAP_PROP_FRAME_HEIGHT)
fps = cap.get(cv2.CAP_PROP_FPS)
print(f"Width: {width}, Height: {height}, FPS: {fps}")
|
可操作的属性列表如下
| 参数名称 |
值 |
说明 |
读/写 |
| CV.CAP_PROP_POS_MSEC |
0 |
当前视频文件的时间位置(返回毫秒)或视频捕获时间戳 |
Y/N |
| CV.CAP_PROP_POS_FRAMES |
1 |
从0开始的解码/捕获时间帧 |
Y/N |
| CV.CAP_PROP_POS_AVI_RATIO |
2 |
返回视频文件的相关位置:0,视频开始。1,视频结束 |
Y/N |
| CV.CAP_PROP_FRAME_WIDTH |
3 |
视频流中的帧宽 |
Y/Y |
| CV.CAP_PROP_FRAME_HEIGHT |
4 |
视频流中的帧高 |
Y/Y |
| CV.CAP_PROP_FPS |
5 |
帧率 |
Y/Y |
| CV.CAP_PROP_FOURCC |
6 |
返回解码方式中的四字符 |
Y/Y |
| CV.CAP_PROP_FRAME_COUNT |
7 |
视频文件的总帧数 |
Y/N |
| CV.CAP_PROP_FORMAT |
8 |
由retrieve()函数返回的矩阵对象的格式 |
Y/N |
| CV.CAP_PROP_MODE |
9 |
用于预测当前捕获模式的后端专用值 |
Y/N |
| CV.CAP_PROP_BRIGHTNESS |
10 |
图像的亮度(仅用于摄像头) |
Y/Y |
| CV.CAP_PROP_CONTRAST |
11 |
图像的对比度(仅用于摄像头) |
Y/Y |
| CV.CAP_PROP_SATURATION |
12 |
图像的饱和度(仅用于摄像头) |
Y/Y |
| CV.CAP_PROP_HUE |
13 |
图像的色调(仅用于摄像头) |
Y/Y |
| CV.CAP_PROP_GAIN |
14 |
图像增益(仅用于摄像头) |
Y/Y |
| CV.CAP_PROP_EXPOSURE |
15 |
曝光度(仅用于摄像头) |
Y/Y |
| CV.CAP_PROP_CONVERT_RGB |
16 |
用于预测图像是否应该被转换为RGB的布尔位 |
Y/N |
| CV.CAP_PROP_WHITE_BALANCE |
17 |
白平衡(当前不支持) |
Y/N |
| CV.CAP_PROP_RECTIFICATION |
18 |
立体相机的纠正位 |
Y/N |
检查是否成功打开视频源
使用cap.isOpened()方法检查是否成功打开视频源
1
2
| if not cap.isOpened():
print("无法打开摄像头")
|
2.逐帧读取视频
使用 read() 方法逐帧读取视频。
1
2
3
4
5
6
7
8
9
| while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
cv2.imshow("Frame", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
|
waitKey(1)非常容易忽略,会看到一个空白或冻结的窗口,即使程序正在运行。
waitKey(0)表示无限等待,直到用户按下任意键。
显示图像后,程序会暂停,画面保持不动。直到你按下任意键(比如空格、q、回车等),程序才会继续往下执行。适合逐帧手动播放视频。
3.释放视频捕获对象
用完视频捕获对象后,应该调用 cap.release()
来释放资源。
含有视频保存的示例
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
| import cv2
cap = cv2.VideoCapture(0)
frame_width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
frame_height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter('output.avi', fourcc, 20.0, (frame_width, frame_height))
print("开始录制... 按 'q' 键停止并保存视频")
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
out.write(frame)
cv2.imshow('Recording...', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
out.release()
cv2.destroyAllWindows()
print("视频已保存为 output.avi")
|
📝 VideoWriter()参数说明
| 参数 |
含义 |
'output.avi' |
输出视频文件名 |
fourcc |
视频编码器,决定视频格式和压缩方式 |
20.0 |
帧率(每秒帧数),通常设为 20~30 |
(width, height) |
帧的分辨率,必须与输入帧一致 |
🎞️ 支持的编码格式(FourCC)
你可以使用不同的 FourCC 编码来生成不同格式的视频文件:
| 编码 |
文件格式 |
备注 |
'XVID' |
.avi |
最常用,兼容性好 |
'MP4V' |
.mp4 |
MP4 格式,清晰度高 |
'MJPG' |
.avi |
不压缩,体积大但速度快 |
'DIVX' |
.avi |
老版本编码器 |
例如:
1
2
| fourcc = cv2.VideoWriter_fourcc(*'MP4V')
out = cv2.VideoWriter('output.mp4', fourcc, 20.0, (640, 480))
|
⚠️ 注意事项
- 视频尺寸必须匹配输入帧大小,否则会写入失败。
- 不要在没有写完所有帧时就调用
release(),否则可能损坏视频文件。
- 某些编码格式在某些系统上不支持,可以尝试更换
FourCC。
Core模块
功能: 提供 OpenCV
的核心功能,包括基本数据结构、矩阵操作、绘图函数等。
主要类和函数:
- Mat: OpenCV
中用于存储图像和矩阵的基本数据结构。
- Scalar: 用于表示颜色或像素值。
- Point、Size、Rect: 用于表示点、尺寸和矩形。
- 基本绘图函数:
cv.line()、cv.circle()、cv.rectangle()、cv.putText()
等。
示例
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| import cv2
import numpy as np
image = np.zeros((500, 500, 3), dtype=np.uint8)
image[450,450:499] = [255,255,0]
cv2.line(image, (50, 50), (400, 400), (0, 0, 255), thickness=2)
cv2.line(image,(300,400),(400,300),(255,0,255),thickness=8)
cv2.circle(image, (250, 250), 100, (255, 0, 0), thickness=3)
cv2.circle(image,(100,100),100,(100,200,300),8)
cv2.rectangle(image, (100, 100), (300, 300), (0, 255, 0), thickness=5)
cv2.rectangle(image,(300,400),(400,300),(255,255,0),8)
cv2.putText(image, "OpenCV Drawing", (50, 450), cv2.FONT_HERSHEY_COMPLEX,1, (255, 255, 255), thickness=2)
cv2.imshow("Drawing Example", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
|
图像在计算机中是以三维数组进行存储的,比如(300,300,3)表示宽为300,高为300,通道数为3的一张图像,一张标量图可以看作三张二维数组的叠加态,具体自行了解吧。
方法参数记忆
cv2.line()
线段的绘制首先需要给出在哪张图像(img)上进行绘制,然后再给出待绘制线段的起点(pt1)与终点(pt2)坐标,再给出线段的颜色(color),以及线段的粗细(thickness)
cv2.circle()
圆形的绘制首先需要确定在哪张图像(img)上进行绘制,然后给出圆心坐标(center)与半径(radius),再给出颜色(color)和线的粗细(thickness)
cv2.rectangle()
矩形的绘制首先需要确定在哪张图像(img)上进行绘制,然后给出两个对角的坐标(pt1、pt2),再给出线的颜色(color)和粗细(thickness)
cv2.putText()
添加文字首先需要确定在哪张图像上进行绘制,然后给出文字内容,再给出文字起始点左下角坐标(org)和字体类型(fontFace),再给出字体大小缩放因子(fontScale)、字体颜色(color)、字体粗细(thickness)
综上来说,先确定图像、然后所绘制图形的属性,主要内容在前,位置在后,最后是图形颜色与粗细。
Imgproc 模块
功能:
提供图像处理功能,包括图像滤波、几何变换、颜色空间转换等。
主要类和函数:
- 图像滤波:
cv.blur()、cv.GaussianBlur()、cv.medianBlur()
等。
- 几何变换:
cv.resize()、cv.warpAffine()、cv.warpPerspective()
等。
- 颜色空间转换:
cv.cvtColor()(如 BGR
转灰度、BGR 转 HSV)。
- 阈值处理:
cv.threshold()、cv.adaptiveThreshold()。
- 边缘检测:
cv.Canny()、cv.Sobel()、cv.Laplacian()。
应用场景:
- 图像平滑、锐化、边缘检测。
- 图像缩放、旋转、仿射变换。
- 图像二值化、颜色空间转换。
示例
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
| import cv2
import numpy as np
image = cv2.imread('../images/lena.png')
if image is None:
print("❌ 错误:图像未找到,请检查路径是否正确!")
exit()
blurred = cv2.GaussianBlur(image, (11, 11), 0)
median_blurred = cv2.medianBlur(image, 5)
resized = cv2.resize(image, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_LINEAR)
rotated = cv2.rotate(image, cv2.ROTATE_90_CLOCKWISE)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
gray2bgr = cv2.cvtColor(gray, cv2.COLOR_GRAY2BGR)
hsv2bgr = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
hsv2rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2RGB)
rgb2bgr = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
bgr2rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
_, binary = cv2.threshold(gray, 128, 255, cv2.THRESH_BINARY)
adaptive_binary = cv2.adaptiveThreshold(
gray, 255,
cv2.ADAPTIVE_THRESH_MEAN_C,
cv2.THRESH_BINARY,
11, 2
)
edges_canny = cv2.Canny(gray, 50, 150)
edges_sobel = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=5)
edges_laplacian = cv2.Laplacian(gray, cv2.CV_64F)
cv2.imshow("Original", image)
cv2.imshow("Gaussian Blur", blurred)
cv2.imshow("Median Blur", median_blurred)
cv2.imshow("Resized", resized)
cv2.imshow("Rotated", rotated)
cv2.imshow("Gray", gray)
cv2.imshow("HSV", hsv)
cv2.imshow("Binary Threshold", binary)
cv2.imshow("Adaptive Threshold", adaptive_binary)
cv2.imshow("Canny Edges", edges_canny)
cv2.imshow("Sobel Edges", edges_sobel)
cv2.imshow("Laplacian Edges", edges_laplacian)
cv2.imshow("Gray2BGR", gray2bgr)
cv2.imshow("Hsv2BGR", hsv2bgr)
cv2.imshow("Hsv2RGB", hsv2rgb)
cv2.imshow("BGR2RGB", bgr2rgb)
cv2.imshow("RGB2BGR", rgb2bgr)
print("✅ 程序已启动,请按任意键关闭所有窗口...")
cv2.waitKey(0)
cv2.destroyAllWindows()
|
HighGUI 模块
功能: 提供高层 GUI 和媒体 I/O
功能,用于图像的显示和交互。
主要类和函数:
- 图像显示:
cv.imshow()、cv.waitKey()、cv.destroyAllWindows()。
- 视频捕获:
cv.VideoCapture()、cv.VideoWriter()。
- 鼠标和键盘事件:
cv.setMouseCallback()。
应用场景:
- 显示图像和视频。
- 捕获摄像头或视频文件。
- 处理用户交互(如鼠标点击、键盘输入)。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
| import cv2
def display_image():
"""
功能描述:
- 读取一张图片并显示在一个窗口中。
- 按下 'q' 键关闭窗口。
"""
image = cv2.imread('../images/lena.png')
if image is None:
print("Error: Image not found!")
return
cv2.imshow("Image Window", image)
key = cv2.waitKey(0)
if key == ord('q'):
print("Quit")
cv2.destroyAllWindows()
def capture_and_save_video():
"""
功能描述:
- 打开默认摄像头(通常是0号设备)进行实时视频采集。
- 将每一帧写入输出视频文件 output.avi。
- 按下 'q' 键退出录制。
"""
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Error: Could not open camera!")
return
fourcc = cv2.VideoWriter_fourcc(*'XVID')
out = cv2.VideoWriter('output.avi', fourcc, 20.0, (640, 480))
while True:
ret, frame = cap.read()
if not ret:
print("Error: Could not read frame!")
break
cv2.imshow("Video Capture", frame)
out.write(frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
out.release()
cv2.destroyAllWindows()
def handle_mouse_events():
"""
功能描述:
- 在图像窗口中监听鼠标事件。
- 当用户左键或右键点击时,在控制台打印坐标信息。
"""
def mouse_callback(event, x, y, flags, param):
"""
参数说明:
event: 事件类型(如单击、移动等)
x, y: 发生事件时的坐标
flags: 特殊按键状态(如Shift、Ctrl等)
param: 用户自定义传参(本例未使用)
"""
if event == cv2.EVENT_LBUTTONDOWN:
print(f"Left button clicked at ({x}, {y})")
elif event == cv2.EVENT_RBUTTONDOWN:
print(f"Right button clicked at ({x}, {y})")
image = cv2.imread('../images/lena.png')
if image is None:
print("Error: Image not found!")
return
cv2.namedWindow("Mouse Events")
cv2.setMouseCallback("Mouse Events", mouse_callback)
while True:
cv2.imshow("Mouse Events", image)
if cv2.waitKey(0) == ord('q'):
break
cv2.destroyAllWindows()
if __name__ == "__main__":
"""
主程序逻辑:
- 提供一个简单的文本菜单,让用户选择要执行的功能
- 支持:
1. 显示图像
2. 捕获并保存视频
3. 处理鼠标事件
"""
print("Choose an option:")
print("1. Display Image")
print("2. Capture and Save Video")
print("3. Handle Mouse Events")
choice = input("Enter your choice (1/2/3): ")
if choice == '1':
display_image()
elif choice == '2':
capture_and_save_video()
elif choice == '3':
handle_mouse_events()
else:
print("Invalid choice!")
|
Video模块
示例
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
| import cv2
def background_subtraction():
"""
功能描述:
- 使用摄像头实时获取视频流。
- 利用 OpenCV 提供的 MOG2 背景建模算法进行背景减除。
- 输出当前帧的前景掩膜图像。
"""
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Error: Could not open camera!")
return
subtractor = cv2.createBackgroundSubtractorMOG2(
history=500,
varThreshold=16,
detectShadows=True
)
while True:
ret, frame = cap.read()
if not ret:
break
mask = subtractor.apply(frame)
cv2.imshow("Original", frame)
cv2.imshow("Background Subtraction", mask)
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
def optical_flow():
"""
功能描述:
- 使用 Lucas-Kanade 光流法追踪特征点运动轨迹。
- 在视频中绘制跟踪点的移动路径。
"""
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Error: Could not open camera!")
return
ret, prev_frame = cap.read()
if not ret:
return
prev_gray = cv2.cvtColor(prev_frame, cv2.COLOR_BGR2GRAY)
prev_points = cv2.goodFeaturesToTrack(prev_gray, maxCorners=100, qualityLevel=0.01, minDistance=10)
while True:
ret, frame = cap.read()
if not ret:
break
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
next_points, status, _ = cv2.calcOpticalFlowPyrLK(prev_gray, gray, prev_points, None)
good_prev = prev_points[status == 1]
good_next = next_points[status == 1]
for i, (p, n) in enumerate(zip(good_prev, good_next)):
x1, y1 = p.ravel()
x2, y2 = n.ravel()
cv2.line(frame, (int(x1), int(y1)), (int(x2), int(y2)), (0, 255, 0), 2)
cv2.imshow("Optical Flow", frame)
prev_gray = gray.copy()
prev_points = good_next.reshape(-1, 1, 2)
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
def object_tracking():
"""
功能描述:
- 使用 KCF 目标跟踪器实现手动选择目标并持续跟踪。
- 用户通过鼠标框选目标区域后开始跟踪。
"""
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Error: Could not open camera!")
return
ret, frame = cap.read()
if not ret:
return
bbox = cv2.selectROI("Select ROI", frame, fromCenter=False)
cv2.destroyAllWindows()
tracker = cv2.TrackerKCF_create()
tracker.init(frame, bbox)
while True:
ret, frame = cap.read()
if not ret:
break
success, bbox = tracker.update(frame)
if success:
x, y, w, h = [int(v) for v in bbox]
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
else:
cv2.putText(frame, "Tracking failure detected", (100, 80),
cv2.FONT_HERSHEY_SIMPLEX, 0.75, (0, 0, 255), 2)
cv2.imshow("Object Tracking", frame)
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
"""
主程序逻辑:
- 提供一个简单的文本菜单,让用户选择要执行的功能
- 支持:
1. 背景减除
2. 光流法
3. 目标跟踪
"""
print("Choose an option:")
print("1. Background Subtraction")
print("2. Optical Flow")
print("3. Object Tracking")
choice = input("Enter your choice (1/2/3): ")
if choice == '1':
background_subtraction()
elif choice == '2':
optical_flow()
elif choice == '3':
object_tracking()
else:
print("Invalid choice!")
|
使用opencv自带的目标跟踪准确率非常低,以下是使用yolo的目标检测代码:
YOLOv8目标检测(CPU)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| from ultralytics import YOLO
import cv2
model = YOLO('yolov8s.pt')
cap = cv2.VideoCapture(0)
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
results = model(frame)
annotated_frame = results[0].plot()
cv2.imshow("YOLOv8 Detection", annotated_frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
|
YOLOv8目标检测(GPU)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
| from ultralytics import YOLO
import cv2
import time
model = YOLO('yolov8s.pt')
device = 'cuda' if model.device.type == 'cuda' else 'cpu'
print(f"当前使用的设备: {device}")
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("错误:无法打开摄像头")
exit()
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
print("开始检测,请查看摄像头窗口... 按 q 键退出")
prev_time = time.time()
while True:
ret, frame = cap.read()
if not ret:
print("读取帧失败,退出...")
break
results = model(frame, device=device)
annotated_frame = results[0].plot()
current_time = time.time()
fps = 1 / (current_time - prev_time)
prev_time = current_time
cv2.putText(annotated_frame, f"FPS: {int(fps)}", (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow("YOLOv8 实时目标检测", annotated_frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
print("用户已按下 q 键,退出检测...")
break
cap.release()
cv2.destroyAllWindows()
|
注意:如果你是笔记本电脑自带的 Intel 集成显卡或
AMD 显卡,目前无法使用 CUDA 加速 YOLOv8
常用总结
| 类别 |
方法 |
示例 |
| 图像读取 |
cv2.imread, cv2.imwrite |
image = cv2.imread('lena.png') |
| 视频处理 |
cv2.VideoCapture, cv2.VideoWriter |
cap = cv2.VideoCapture(0) |
| 几何变换 |
cv2.resize, cv2.rotate |
resized = cv2.resize(image, None, fx=0.5, fy=0.5) |
| 颜色空间 |
cv2.cvtColor |
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) |
| 滤波去噪 |
cv2.GaussianBlur, cv2.medianBlur |
blurred = cv2.GaussianBlur(image, (11, 11), 0) |
| 边缘检测 |
cv2.Canny, cv2.Sobel |
edges = cv2.Canny(gray, 50, 150) |
| 阈值处理 |
cv2.threshold, cv2.adaptiveThreshold |
_, binary = cv2.threshold(gray, 128, 255, cv2.THRESH_BINARY) |
| 目标跟踪 |
cv2.TrackerKCF_create |
tracker = cv2.TrackerKCF_create() |
| 绘制图形 |
cv2.putText, cv2.rectangle |
cv2.rectangle(image, (100, 100), (200, 200), (0, 255, 0), 2) |
补充:
opencv中图像坐标的原点 (0, 0) 在 左上角
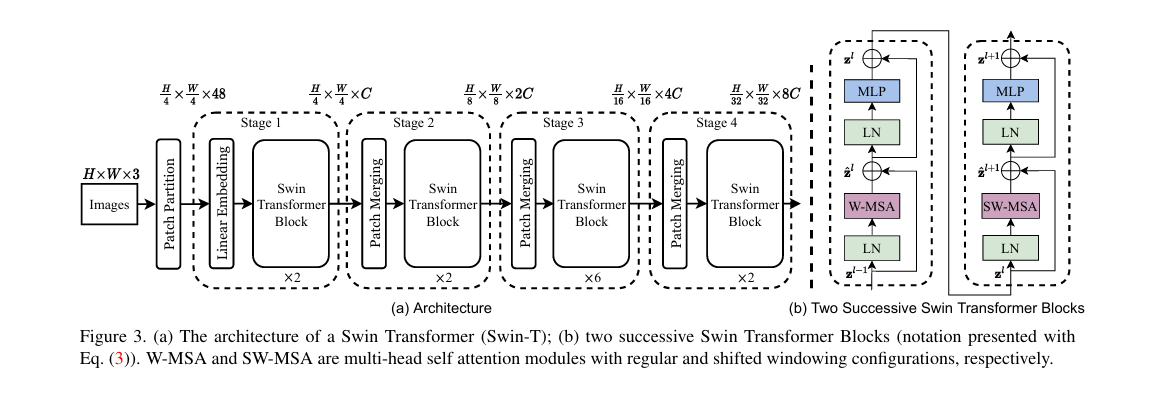
一般来说,在深度学习中,NCHW 和
NHWC
是两种常见的数据格式,用于表示图像数据的存储方式。它们分别代表不同的维度排列顺序。
- NCHW:N 表示批量大小(Batch),C
表示通道数(Channel),H 表示高度(Height),W 表示宽度(Width)。
- NHWC:N 表示批量大小(Batch),H
表示高度(Height),W 表示宽度(Width),C 表示通道数(Channel)。
性能差异:在 GPU 上,NCHW
格式更适合,因为它可以利用 GPU 的并行性,计算卷积时比 NHWC 要快约 2.5
倍。在 CPU 上,NHWC 格式更适合,因为它可以利用 SSE 或 AVX
优化,沿着最后一维(即 C 维)计算会更快
不同的深度学习框架对 NCHW 和 NHWC 格式的支持情况如下:
- TensorFlow:默认使用 NHWC 格式,GPU 也支持
NCHW。
- Caffe:使用 NCHW 格式。
- PyTorch:使用 NCHW 格式